5G远程机器人辅助胸腔镜手术五例
时间:2025-09-07 12:10:06 热度:37.1℃ 作者:网络
摘 要
目的 探索远程机器人辅助胸腔镜手术的安全性及可行性。方法 回顾性分析甘肃省人民医院胸外诊疗中心2024年5—10月行5G远程机器人辅助胸腔镜手术患者的临床资料。结果 共纳入5例患者,其中男2例、女3例,中位年龄50(42~63)岁。手术均成功,其中肺叶切除术1例,肺部分切除术3例,纵隔病损切除术1例。无中转开胸,无手术并发症发生,无死亡。5例患者术中信号延时中位数39(37~42)ms;术者术中心理负荷评分中位数9(3~13)分;手术时间中位数100(80~122)min;术中出血量中位数100(30~200)mL;置管引流时间中位数为4(3~5)d;术后第1、2、3 天引流量中位数分别为200(100~300)mL、150(60~220)mL、 80(30~180)mL;术后住院时间中位数4(3~7)d;术后第1、2、3 天疼痛度中位数分别3(1~4)分、3(0~3)分、 1(0~3)分。结论 5G远程机器人辅助胸腔镜手术安全有效,手术体验良好,操作流畅,术中延迟短。
正 文
目前胸外科大部分手术均通过电视胸腔镜系统和胸腔镜机器人系统辅助完成,自2006年达芬奇机器人引入国内以来,其在胸外科手术领域迅速发展,机器人较传统胸腔镜的优势也逐渐显现。与胸腔镜手术相比,机器人辅助胸腔镜的兴起带来更多手术益处,腕式仪器,消除震颤,灵巧,放大,允许更精确和精细的组织和血管解剖等[1]。随着5G 技术的成熟,其高速、低延迟等特点为远程手术的发展提供了强有力的支撑,在医疗领域中远程医疗的发展将会是未来实现医疗资源平均化的重要途径。由于当前我国医疗资源分布不均、偏远地区医疗技术发展较慢,5G远程手术技术的发展打破了地域限制,扩大了优质医疗资源的覆盖范围,使医生与患者之间的医疗资源能够更高效地分配和对接[2-4]。我们于2024年5—10月完成5 例5G 远程胸外科手术,现报道如下。
1 资料与方法
1.1 临床资料
5 例患者均完善术前相关检查:心电图、肺功能、腹部超声、头颅核磁共振成像等,均未见异常,未发现手术禁忌。患者无既往手术史,无其它恶性肿瘤病史。排除转移,于全身麻醉下行5G远程机器人辅助胸腔镜手术。术者于甘肃省人民医院新区分院手术室操作,患者位于甘肃省人民医院本院区手术室,术者与患者相距63 km。本次手术使用图迈®胸腹腔内窥镜手术系统(型号规格:MT-1 000)包含医生控制台、患者手术平台、图像平台组成、 3D 电子内窥镜、手术器械以及远程通讯工作站。通过远程通讯工作站实现内窥镜3D 图像远程传输,视频会议等功能,辅助胸腹腔内窥镜手术系统执行远程手术。手术中,通过远程手术演示系统将手术画面投放至手术现场的显示屏,并通过视频会议系统实现无障碍沟通,实时展示两地场景,手术现场情况及患者生命体征通过网络实时传输,使术者全面掌握手术现场的动态。
术前准备:为确保手术顺利进行,两地端进行多次模拟演练,以及设备检查、网络测试等。此次手术所应用的胸腹腔内窥镜手术系统从硬件和软件层面均设置了多重保护机制避免因设备故障导致的手术意外发生。如发生一般故障可通过更换手术器械或由技师/手术团队人员解决,个别系统严重故障可能会使手术方式发生改变。
1.2 手术资料
1.2.1 肺叶切除术
患者全身麻醉,健侧 90°卧位,单肺通气,腋中线第8 胁间隙为进镜孔,锁骨中线第5肋间隙为1 号机械臂孔,腋后线第8肋间隙为2号机械臂孔。腋前线第7 肋间隙为操作孔。术中探查见病灶,肺叶切除的入路方式根据肺裂发育情况而定,如果肺裂发育良好则采用解剖式肺叶切除术,如肺裂发育不良则采用单向式肺叶切除术。顺利切除病变肺叶后清扫淋巴结,严格止血,经进镜孔放置引流管,固定引流管,接闭式引流瓶。逐层关闭操作孔。
1.2.2 肺部分切除术
患者全身麻醉,健侧 90°卧位,单肺通气,腋中线第8 肋间隙为进镜孔,锁骨中线第5肋间隙为1 号机械臂孔,腋后线第8肋间隙为2号机械臂孔。腋前线第7 肋间隙为操作孔。结合术前患者胸部CT决定所切除病灶,直线切割闭合器将病灶完整切除,术中送冰冻,根据冰冻结果决定是否清扫淋巴结以及后续手术,严密止血,经进镜孔放置引流管,固定引流管,接闭式引流瓶。逐层关闭操作孔。
1.2.3 纵隔病损切除术
患者全身麻醉,双腔气管插管,右侧45°斜卧位,常规右侧胸壁消毒铺巾,腋中线第6肋为2 号臂观察孔,锁骨中线第6肋为1号臂孔,腋前线第3 肋为3号臂孔,术中见病变位于前上纵隔,自右侧膈神经内侧缘及右侧心包旁游离纵隔脂肪组织,见纵隔肿物位于左无名静脉前方,仔细游离脂肪组织及纵隔肿物组织,并将其完整游离并切除,严密止血,放置胸前引流管,接闭式引流瓶。逐层关闭操作孔。
1.3 观察指标及疗效评价
(1)远程手术成功率:a、研究者在远程端完成对应的外科手术治疗,且术中未发生术式改变(包括从远程内窥镜手术系统辅助方法转换为其他内窥镜手术系统辅助、胸腔镜下手术或者开放性手术);b、术后 24 h 内未发生因术中并发症导致的二次手术。以上a和b 同时满足要求定义为远程手术成功;(2)术中平均网络信号延时;(3)机器人辅助手术时间;(4)术中失血量;(5)胸腔引流管引流时间;(6)胸腔引流量;(7)术后住院时间;(8)术后疼痛评分。评分均采用数字模拟评分法(numeric rating scale,NRS)疼痛评分 :0分:无痛;3分以下:有轻微的疼痛,能忍受;4~6 分:患者疼痛并影响睡眠,尚能忍受:7~10分:患者有渐强烈的疼痛,疼痛难忍,影响食欲,影响睡眠。具体做法:告知患者根据自我感觉在0~10 这11 个数字中选择一个数字,表示疼痛的程度,其中0表示无任何疼痛,10 表示无法忍受的剧痛,中间数字表示不同程度的疼痛。每次评分时让患者做3次评分,分别代表过去24 h内最痛的程度、最不痛的程度、目前的疼痛程度,当日的疼痛评分为以上3个值的平均数。(9)主刀医师术中心理负荷评价;评价方式:评价远程端主刀医师术中心理负荷,由远程端主刀医师在术后 24 h内填写主观心智负荷量表(subjective mental effort questionnaire,SME),以视觉模拟评分方式,对手术过程中的心理感受进行回顾评价;见图1。(10)术中操作感受的主观评价;评价方式:进行手术治疗操作的主刀医师完成术中操作感受的主观评价。评价内容包括术中远程操作、术中图像质量、术中远程高清影像的图像质量、术中远程影像的传输即时性、术中远程声音传输的即时性和稳定性。由进行手术治疗操作的主刀医师术后 24 h 内填写术中操作感受的主观评价表;见附表1。
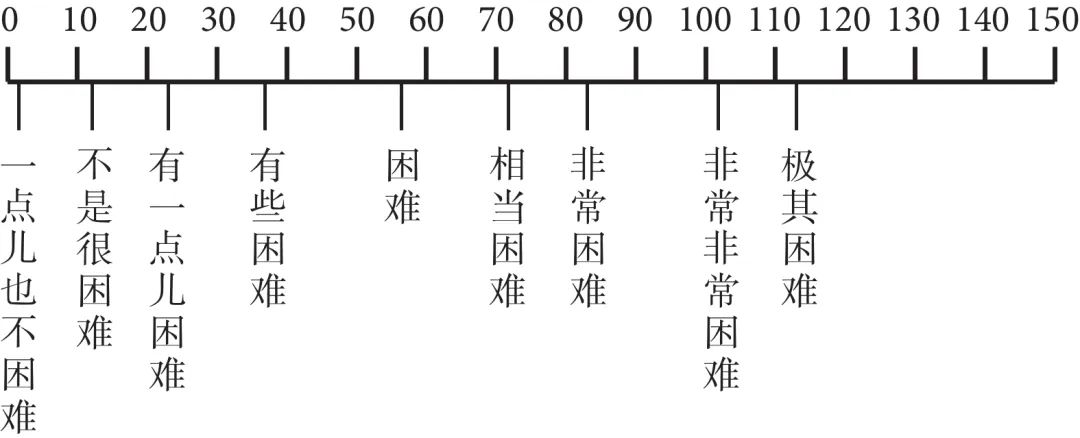
图 1 根据比例尺的示意,评价完成本次手术的困难程度,并选择一个锚点上的数字作为最终评分
1.4 伦理审查
此研究通过甘肃省人民医院医学伦理委员会批准,批准号为2024-770。
2 结果
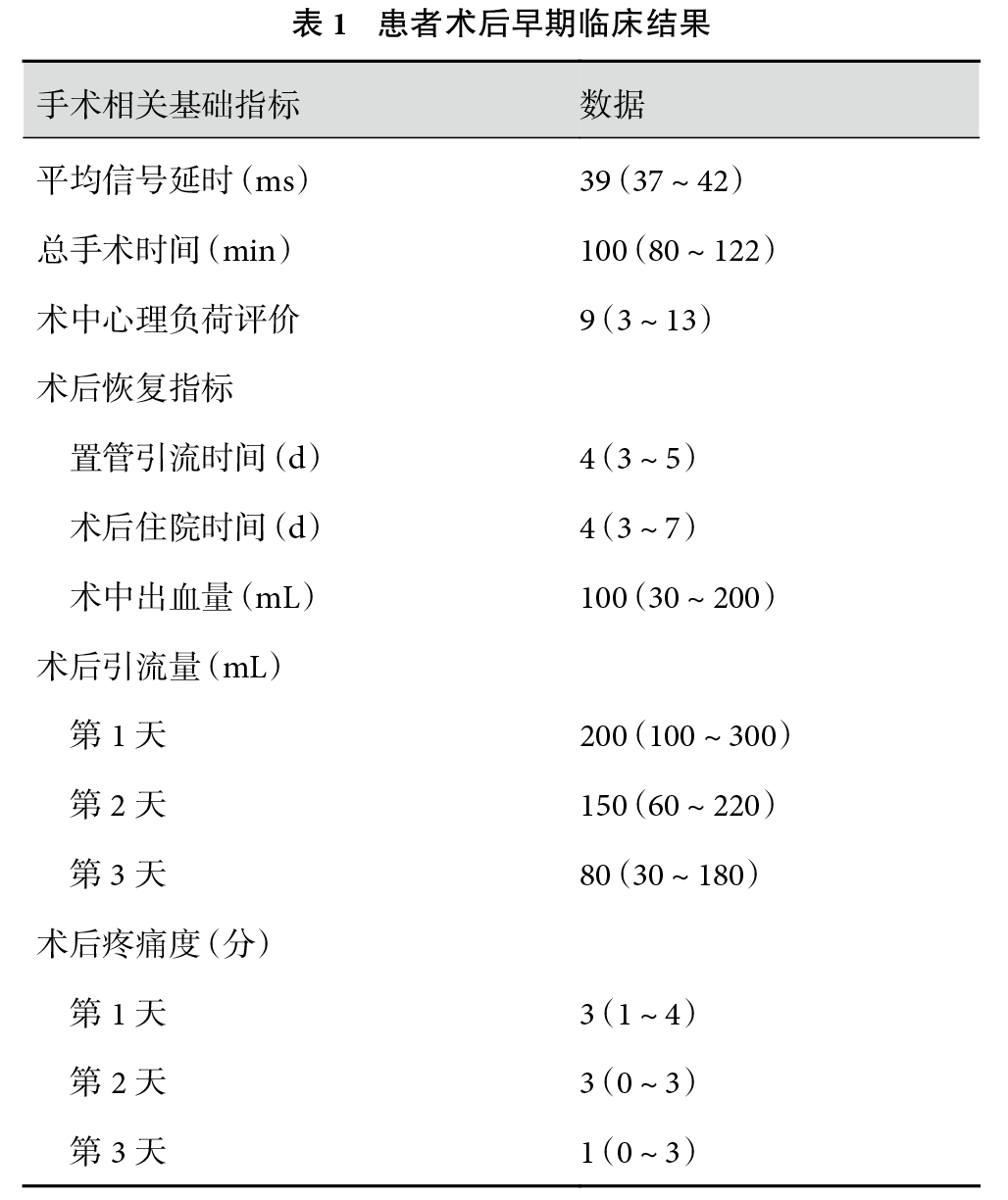
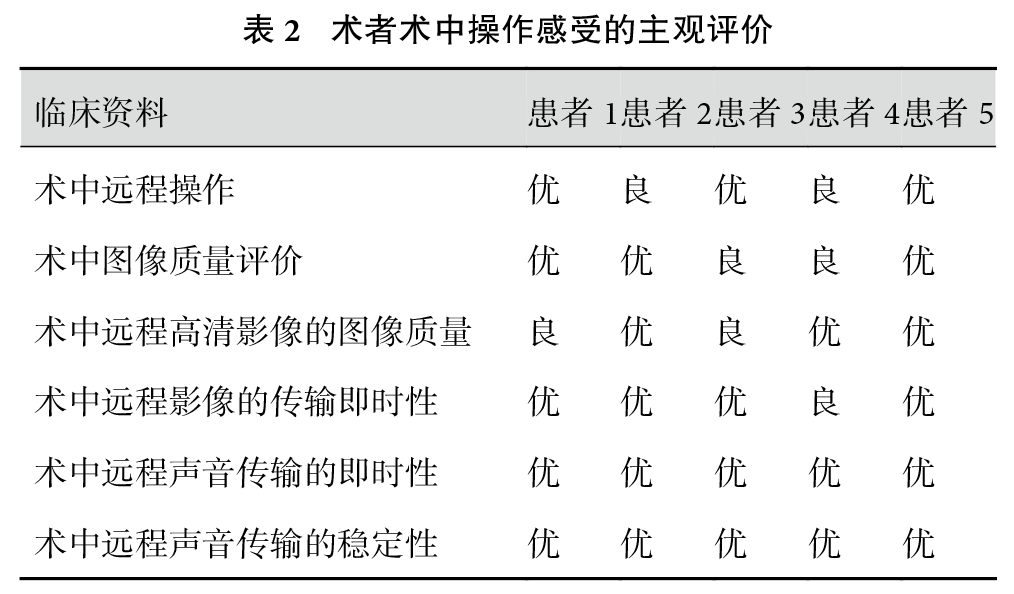
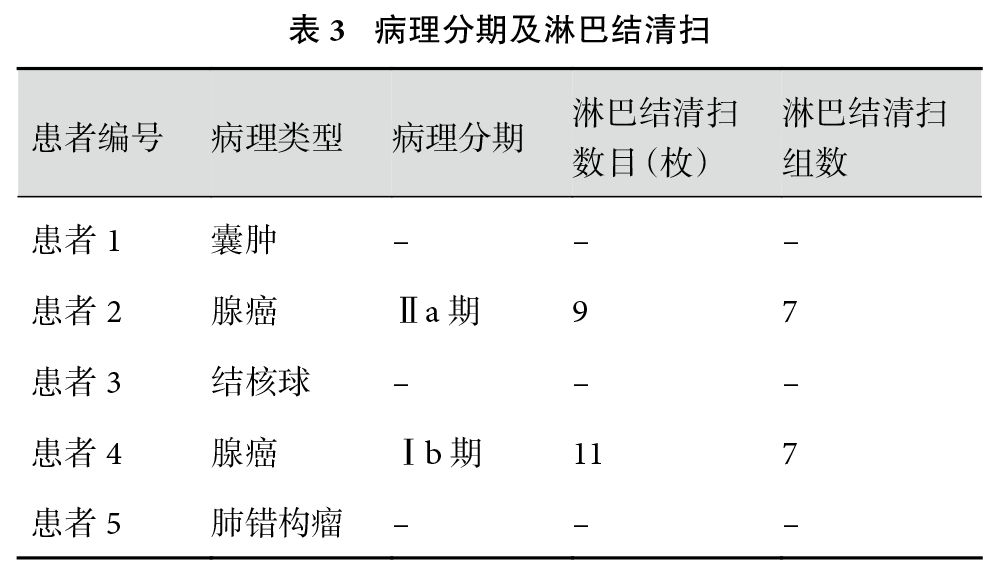
5 例患者中男2例,女3例,中位年龄50(42~63)岁,均行远程机器人辅助手术,其中肺叶切除术1例,肺部分切除术3例,纵隔病损切除术1例。5 例患者均获手术成功,无中转开胸,无手术并发症发生,无死亡。患者术后疼痛感轻微,术后2 d左右即可下地活动。患者术后早期临床结果见表1。术者术中操作感受的主观评价见表2。病理分期及淋巴结清扫见表3。
3 讨论
近几年我国5G 通信技术下的远程机器人手术发展十分迅速[7]。5G 技术的高速、低延迟的优势为远程手术所需要的稳定性、安全性等提供了强大支撑。2001 年Marescaux 等[8]报道全球首例远程机器人手术,标志全球进入现代远程手术研究阶段。虽然已有多例5G 远程机器人报道[9-12],但胸外科领域报道相对较少。
本文报道的5 例胸外科常见手术,均顺利完成,术者术中体验感良好,术中延时短,与传统机器人手术相差不大。术中延时可随术者操作经验累积很快适应。5例手术中术者“术中心理负荷评分”为3~13,根据量表显示:这5 例手术操作难度在“一点儿也不困难”到“不是很困难”之间,但困难评分较高的手术,其手术困难度本身也较高。“术者术中操作感受的主观评价表”显示所有手术远程操作指标均为优或良,可见远程手术在传输方面总体表现良好,对术者操作影响小。本次我中心术者与患者相距63 km,距离相对较短。但有多项距离相距更长的文献[13, 14]报道的术中延迟与我中心相差不大,这表明随着距离的增加网络延迟变化甚微。
5G远程手术的另一大困难是术者与助手的沟通。本次手术的视频会议实现了术者与助手的无障碍沟通,当然术者对机器人手术的熟练度以及团队整体的配合程度也非常重要。本团队于2016 年开展机器人手术,是西北地区首先开展机器人胸外科手术的团队之一,具有丰富的手术经验,这为本次远程胸外科手术取得成功奠定了良好的基础。展望未来,远程手术能否为我国偏远地区医疗资源提供便利,本地端助手医疗团队的整体医疗技术也非常重要,因此未来远程手术的全面开展面临很大挑战,包括机器人设备在医疗资源匮乏地区能否普及,术者团队对机器人手术的熟练程度,本地端助手医生团队的医疗水平,术者、护士、本地端助手医生三者的配合度等[15-16]。再者由于远程手术为跨地域操作,需要远程主刀医生、本地助手医生和通信网络三者协作,涉及的法律和伦理问题更加复杂,任何一方出现问题都可能影响手术的成功与患者的安全。因此,需要制定相关法律和规章制度明确各方的责任和义务,以明确远程手术中可能发生的医疗事故责任归属问题。尤其是在并发症发生或手术失败时,如何追责和赔偿是亟待解决的关键问题[17]。
综上所述,5G 远程机器人辅助胸腔镜手术安全有效,手术体验良好,操作流畅,术中延迟短。
利益冲突:无。
作者贡献:左庄负责文章撰写;唐旭、陈文龙负责数据的收集;金大成、曹炜负责数据整理;苟云久负责文章设计和审阅。
本文附件表1见期刊电子版。

